#include <ossimLensDistortion.h>
Public Member Functions | |
| ossimLensDistortion (const ossimDpt &callibratedCenter=ossimDpt(0, 0)) | |
| void | setCenter (const ossimDpt ¢er) |
| const ossimDpt & | getCenter () const |
| virtual void | forward (const ossimDpt &input, ossimDpt &output) const |
| virtual void | inverse (const ossimDpt &input, ossimDpt &output) |
| virtual void | distort (const ossimDpt &input, ossimDpt &output) const |
| virtual void | undistort (const ossimDpt &input, ossimDpt &output) const =0 |
| virtual bool | saveState (ossimKeywordlist &kwl, const char *prefix=0) const |
| virtual bool | loadState (const ossimKeywordlist &kwl, const char *prefix=0) |
 Public Member Functions inherited from ossim2dTo2dTransform Public Member Functions inherited from ossim2dTo2dTransform | |
| virtual void | forward (ossimDpt &modify_this) const |
| virtual void | inverse (const ossimDpt &input, ossimDpt &output) const |
| virtual void | inverse (ossimDpt &modify_this) const |
| virtual const ossim2dTo2dTransform & | operator= (const ossim2dTo2dTransform &rhs) |
| virtual ossimDpt | getOrigin () const |
| virtual std::ostream & | print (std::ostream &out) const |
| Generic print method. More... | |
| void | setConvergenceThreshold (const double &new_threshold) |
| void | setMaxIterations (int new_max_iters) |
| void | setDxDy (const ossimDpt &dxdy) |
| Public Member Functions inherited from ossimObject | |
| ossimObject () | |
| virtual | ~ossimObject () |
| virtual ossimObject * | dup () const |
| virtual ossimString | getShortName () const |
| virtual ossimString | getLongName () const |
| virtual ossimString | getDescription () const |
| virtual ossimString | getClassName () const |
| virtual RTTItypeid | getType () const |
| virtual bool | canCastTo (ossimObject *obj) const |
| virtual bool | canCastTo (const RTTItypeid &id) const |
| virtual bool | canCastTo (const ossimString &parentClassName) const |
| virtual bool | isEqualTo (const ossimObject &obj, ossimCompareType compareType=OSSIM_COMPARE_FULL) const |
| virtual void | accept (ossimVisitor &visitor) |
| Public Member Functions inherited from ossimReferenced | |
| ossimReferenced () | |
| ossimReferenced (const ossimReferenced &) | |
| ossimReferenced & | operator= (const ossimReferenced &) |
| void | ref () const |
| increment the reference count by one, indicating that this object has another pointer which is referencing it. More... | |
| void | unref () const |
| decrement the reference count by one, indicating that a pointer to this object is referencing it. More... | |
| void | unref_nodelete () const |
| decrement the reference count by one, indicating that a pointer to this object is referencing it. More... | |
| int | referenceCount () const |
Protected Attributes | |
| ossimDpt | theCenter |
| Protected Attributes inherited from ossim2dTo2dTransform | |
| double | theConvergenceThreshold |
| int | theMaxIterations |
| ossimDpt | theDxDy |
Additional Inherited Members | |
| Protected Member Functions inherited from ossim2dTo2dTransform | |
| ossim2dTo2dTransform () | |
| virtual | ~ossim2dTo2dTransform () |
| Protected Member Functions inherited from ossimReferenced | |
| virtual | ~ossimReferenced () |
Detailed Description
Definition at line 17 of file ossimLensDistortion.h.
Constructor & Destructor Documentation
◆ ossimLensDistortion()
|
inline |
Definition at line 20 of file ossimLensDistortion.h.
Member Function Documentation
◆ distort()
Definition at line 57 of file ossimLensDistortion.cpp.
References DBL_EPSILON, ossim2dTo2dTransform::theConvergenceThreshold, ossim2dTo2dTransform::theMaxIterations, ossimDpt::u, undistort(), ossimDpt::v, ossimDpt::x, and ossimDpt::y.
Referenced by ossimSmacCallibrationSystem::test(), ossimApplanixUtmModel::worldToLineSample(), ossimSpectraboticsRedEdgeModel::worldToLineSample(), and ossimApplanixEcefModel::worldToLineSample().
◆ forward()
|
inlinevirtual |
Implements ossim2dTo2dTransform.
Definition at line 29 of file ossimLensDistortion.h.
◆ getCenter()
|
inline |
Definition at line 28 of file ossimLensDistortion.h.
◆ inverse()
|
inlinevirtual |
Definition at line 34 of file ossimLensDistortion.h.
◆ loadState()
|
virtual |
Method to the load (recreate) the state of the object from a keyword list. Return true if ok or false on error.
Reimplemented from ossim2dTo2dTransform.
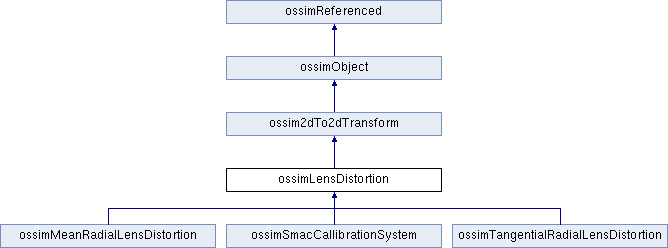
Reimplemented in ossimMeanRadialLensDistortion, and ossimTangentialRadialLensDistortion.
Definition at line 33 of file ossimLensDistortion.cpp.
References ossimKeywordlist::find(), ossim2dTo2dTransform::loadState(), ossimString::split(), theCenter, ossimString::trim(), ossimDpt::x, and ossimDpt::y.
Referenced by ossimTangentialRadialLensDistortion::loadState(), and ossimMeanRadialLensDistortion::loadState().
◆ saveState()
|
virtual |
Method to save the state of the object to a keyword list. Return true if ok or false on error.
Reimplemented from ossim2dTo2dTransform.
Reimplemented in ossimMeanRadialLensDistortion, and ossimTangentialRadialLensDistortion.
Definition at line 20 of file ossimLensDistortion.cpp.
References ossimKeywordlist::add(), ossim2dTo2dTransform::saveState(), theCenter, ossimString::toString(), ossimDpt::x, and ossimDpt::y.
Referenced by ossimTangentialRadialLensDistortion::saveState(), and ossimMeanRadialLensDistortion::saveState().
◆ setCenter()
|
inline |
Definition at line 24 of file ossimLensDistortion.h.
◆ undistort()
|
pure virtual |
Implemented in ossimSmacCallibrationSystem, ossimMeanRadialLensDistortion, and ossimTangentialRadialLensDistortion.
Referenced by distort().
Member Data Documentation
◆ theCenter
|
protected |
Definition at line 49 of file ossimLensDistortion.h.
Referenced by loadState(), saveState(), ossimMeanRadialLensDistortion::undistort(), and ossimSmacCallibrationSystem::undistort().
The documentation for this class was generated from the following files:
