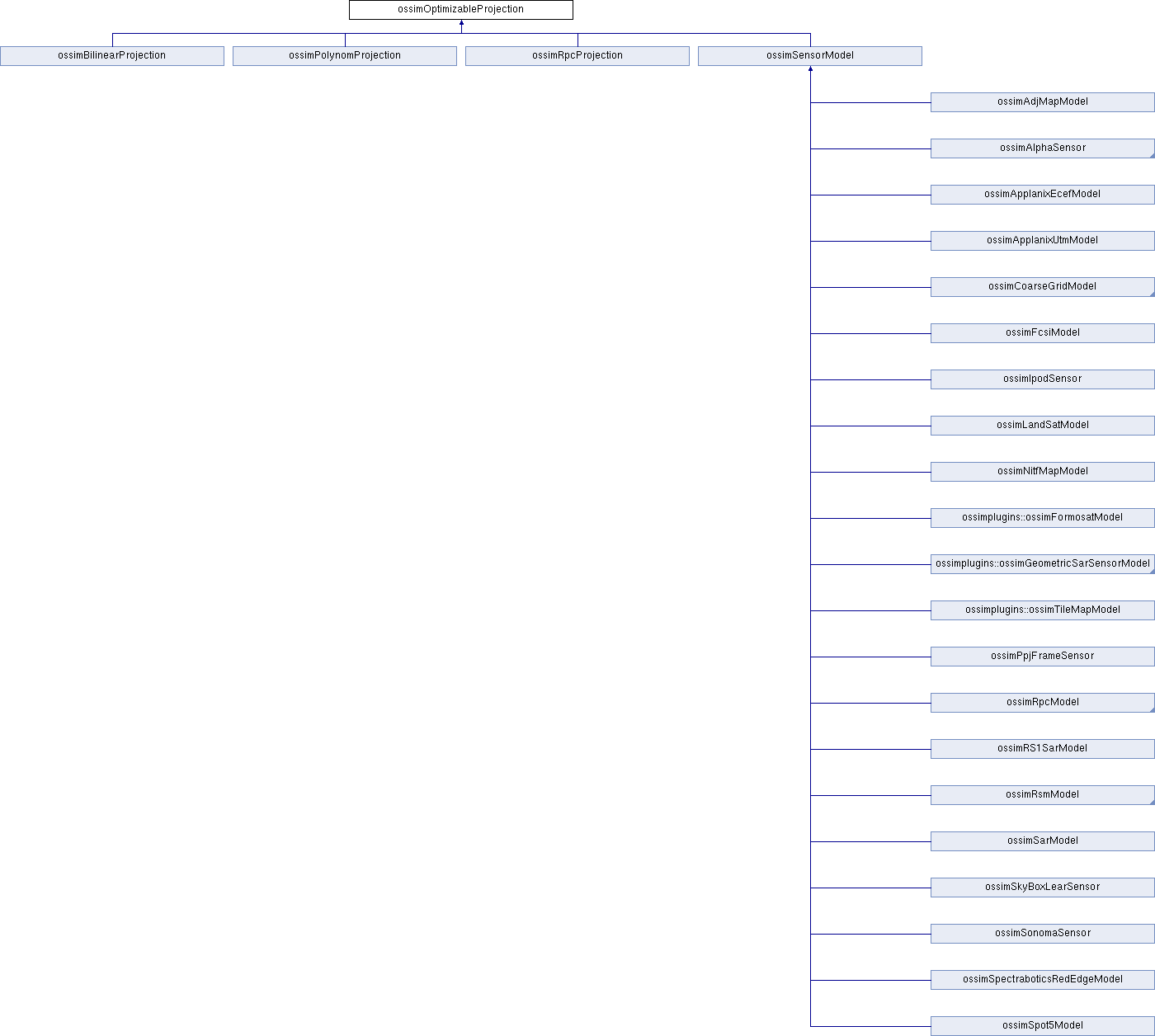
virtual class enabling projection optimization (can be used for outlier rejection - RANSAC) More...
#include <ossimOptimizableProjection.h>
Public Member Functions | |
| ossimOptimizableProjection () | |
| ossimOptimizableProjection (const ossimOptimizableProjection &source) | |
| virtual | ~ossimOptimizableProjection () |
| virtual ossimOptimizableProjection & | operator= (const ossimOptimizableProjection &source) |
| virtual bool | setupOptimizer (const ossimString &setup) |
| setupFromString() Derived classes should implement as needed. Initialize parameters needed for optimizeFit and degreesOfFreedom More... | |
| virtual bool | useForward () const =0 |
| virtual ossim_uint32 | degreesOfFreedom () const =0 |
| virtual bool | needsInitialState () const |
| needsInitialState() More... | |
| virtual double | optimizeFit (const ossimTieGptSet &tieSet, double *targetVariance=0)=0 |
Detailed Description
virtual class enabling projection optimization (can be used for outlier rejection - RANSAC)
Definition at line 20 of file ossimOptimizableProjection.h.
Constructor & Destructor Documentation
◆ ossimOptimizableProjection() [1/2]
| ossimOptimizableProjection::ossimOptimizableProjection | ( | ) |
◆ ossimOptimizableProjection() [2/2]
| ossimOptimizableProjection::ossimOptimizableProjection | ( | const ossimOptimizableProjection & | source | ) |
Definition at line 8 of file ossimOptimizableProjection.cpp.
◆ ~ossimOptimizableProjection()
|
virtual |
Definition at line 14 of file ossimOptimizableProjection.cpp.
Member Function Documentation
◆ degreesOfFreedom()
|
pure virtual |
degreesOfFreedom() number of degrees of freedom (eg: 8 for bilinear, 6 for affine, 2 for translation) especially useful when not inheriting from AdjustableParameterInterface
Implemented in ossimSensorModel, ossimRpcProjection, ossimBilinearProjection, and ossimPolynomProjection.
◆ needsInitialState()
|
virtual |
- Returns
- This implementation returns false. Sub classes should true if the projection needs to be initialized to be optimized, eg: sensor models.
Reimplemented in ossimSensorModel.
Definition at line 33 of file ossimOptimizableProjection.cpp.
◆ operator=()
|
virtual |
Definition at line 17 of file ossimOptimizableProjection.cpp.
Referenced by ossimRpcProjection::operator=(), and ossimSensorModel::operator=().
◆ optimizeFit()
|
pure virtual |
optimizeFit() adjusts projection to GLOBALLY fit best to ALL tie points (no outlier rejection) can select an optional threshold for accuracy
RETURNS : resulting image error variance of fitted model, or negative value for error
IMPORTANT : the unit for *targetVariance and the returned value is : meters^2 when useForward() is true OR pixel^2 if useForward() is false
Implemented in ossimSensorModel, ossimRpcProjection, ossimBilinearProjection, and ossimPolynomProjection.
◆ setupOptimizer()
|
virtual |
setupFromString() Derived classes should implement as needed. Initialize parameters needed for optimizeFit and degreesOfFreedom
- Returns
- This implementation does nothing and returns false.
Reimplemented in ossimRpcModel, ossimLandSatModel, ossimRpcProjection, ossimplugins::ossimFormosatModel, ossimSpot5Model, ossimApplanixEcefModel, ossimBilinearProjection, ossimSpectraboticsRedEdgeModel, ossimPolynomProjection, and ossimApplanixUtmModel.
Definition at line 27 of file ossimOptimizableProjection.cpp.
◆ useForward()
|
pure virtual |
useForward() return true when it's better (more accurate / fast) to use forward (from ground to image) than inverse(from image to ground)
Implemented in ossimFcsiModel, ossimRpcModel, ossimplugins::ossimGeometricSarSensorModel, ossimSarModel, ossimRpcProjection, ossimLandSatModel, ossimAdjMapModel, ossimSonomaSensor, ossimplugins::ossimTileMapModel, ossimCoarseGridModel, ossimplugins::ossimFormosatModel, ossimSpot5Model, ossimRS1SarModel, ossimSkyBoxLearSensor, ossimApplanixEcefModel, ossimBilinearProjection, ossimIpodSensor, ossimSpectraboticsRedEdgeModel, ossimNitfMapModel, ossimRsmModel, ossimPolynomProjection, ossimApplanixUtmModel, ossimPpjFrameSensor, and ossimAlphaSensor.
Referenced by ossimSensorModel::buildNormalEquation(), and ossimSensorModel::getResidue().
The documentation for this class was generated from the following files:
