This class is able to direct localisation and indirect localisation using the RadarSat sensor model. More...
#include <ossimRadarSatModel.h>
Public Member Functions | |
| ossimRadarSatModel () | |
| Constructor. More... | |
| ossimRadarSatModel (const ossimRadarSatModel &rhs) | |
| copy constructor More... | |
| virtual | ~ossimRadarSatModel () |
| Destructor. More... | |
| virtual ossimString | getClassName () const |
| Method to return the class name. More... | |
| virtual ossimObject * | dup () const |
| Returns pointer to a new instance, copy of this. More... | |
| virtual double | getSlantRangeFromGeoreferenced (double col) const |
| This function associates an image column number to a slant range when the image is georeferenced (ground projected) More... | |
| bool | open (const ossimFilename &file) |
| Method to intantial model from a file. More... | |
| virtual bool | saveState (ossimKeywordlist &kwl, const char *prefix=0) const |
| Method to save object state to a keyword list. More... | |
| virtual bool | loadState (const ossimKeywordlist &kwl, const char *prefix=0) |
| Method to the load (recreate) the state of the object from a keyword list. More... | |
 Public Member Functions inherited from ossimplugins::ossimGeometricSarSensorModel Public Member Functions inherited from ossimplugins::ossimGeometricSarSensorModel | |
| ossimGeometricSarSensorModel () | |
| default constructor More... | |
| ossimGeometricSarSensorModel (const ossimGeometricSarSensorModel &rhs) | |
| copy constructor More... | |
| virtual | ~ossimGeometricSarSensorModel () |
| Destructor. More... | |
| virtual double | getSlantRange (double col) const |
| This function associates an image column number to a slant range. More... | |
| virtual JSDDateTime | getTime (double line) const |
| This function associates an image line number to an azimuth time. More... | |
| virtual bool | getPlatformPositionAtLine (double line, vector< double > &position, vector< double > &speed) |
| This function associates an image line number to a platform position and speed. More... | |
| virtual void | lineSampleHeightToWorld (const ossimDpt &image_point, const double &heightEllipsoid, ossimGpt &worldPoint) const |
| This function is able to convert image coordinates into world coordinates the geometric model of SAR sensors. More... | |
| virtual bool | optimizeModel (const std::list< ossimGpt > &groundCoordinates, const std::list< ossimDpt > &imageCoordinates) |
| This function optimizes the model according to a list of Ground Control Points. More... | |
| virtual void | clearGCPlist () |
| Clears _optimizationGCPsGroundCoordinates and _optimizationGCPsImageCoordinates attributes Updates the optimisation factors and bias. More... | |
| virtual void | getGCPlist (std::list< ossimGpt > &groundCoordinates, std::list< ossimDpt > &imageCoordinates) |
| Returns _optimizationGCPsGroundCoordinates and _optimizationGCPsImageCoordinates attributes. More... | |
| virtual bool | useForward () const |
| virtual std::ostream & | print (std::ostream &out) const |
| double | get_optimizationFactorX () const |
| Accessors to the optimization parameters. More... | |
| double | get_optimizationFactorY () const |
| double | get_optimizationBiasX () const |
| double | get_optimizationBiasY () const |
| ossimRefPtr< ossimCoarseGridModel > | getReplacementOcgModel () |
| virtual void | lineSampleToWorld (const ossimDpt &image_point, ossimGpt &gpt) const |
| void | set_platformPosition (PlatformPosition *platformPosition) |
| Accessors to the plateform, sensor parameters and reference point. More... | |
| void | set_sensorParams (SensorParams *sensorParams) |
| void | set_refPoint (RefPoint *refPoint) |
| PlatformPosition * | get_platformPosition () const |
| SensorParams * | get_sensorParams () const |
| RefPoint * | get_refPoint () const |
| Public Member Functions inherited from ossimSensorModel | |
| ossimSensorModel () | |
| ossimSensorModel (const ossimSensorModel ©_this) | |
| ossimSensorModel (const ossimKeywordlist &geom_kwl) | |
| const ossimSensorModel & | operator= (const ossimSensorModel &rhs) |
| assignment operator More... | |
| virtual ossimObject * | getBaseObject () |
| virtual const ossimObject * | getBaseObject () const |
| virtual ossimGpt | origin () const |
| virtual ossimDpt | getMetersPerPixel () const |
| virtual const double & | getNominalPosError () const |
| Returns the estimated Absolute horizontal position error (CE90) of the sensor model. More... | |
| virtual const double & | getRelativePosError () const |
| Returns the estimated RELATIVE horizontal position error (CE90) of the sensor model. More... | |
| virtual void | setNominalPosError (const double &ce90) |
| Assigns the absolute image position error uncertainty (abs CE90) More... | |
| virtual void | setRelativePosError (const double &ce90) |
| Assigns the relative image position error uncertainty (rel CE90) More... | |
| virtual void | worldToLineSample (const ossimGpt &world_point, ossimDpt &image_point) const |
| virtual void | imagingRay (const ossimDpt &image_point, ossimEcefRay &image_ray) const |
| void | setRefImgPt (const ossimDpt &pt) |
| Sets the center line sampe of the image. More... | |
| void | setRefGndPt (const ossimGpt &pt) |
| Sets the center latitude, longitude, height of the image. More... | |
| void | setImageRect (const ossimDrect &imageRect) |
| void | setGroundRect (const ossimGpt &ul, const ossimGpt &ur, const ossimGpt &lr, const ossimGpt &ll) |
| ossimDpt | imageSize () const |
| void | setImageSize (const ossimDpt &size) |
| virtual void | adjustableParametersChanged () |
| virtual void | updateModel () |
| virtual bool | insideImage (const ossimDpt &p) const |
| virtual bool | operator== (const ossimProjection &proj) const |
| const ossimString & | getImageID () const |
| Access methods: More... | |
| const ossimDrect & | getImageClipRect () const |
| virtual ossim_uint32 | degreesOfFreedom () const |
| virtual bool | needsInitialState () const |
| needsInitialState() More... | |
| virtual double | optimizeFit (const ossimTieGptSet &tieSet, double *targetVariance=0) |
| virtual ossimDpt | getForwardDeriv (int parmIdx, const ossimGpt &gpos, double hdelta=1e-11) |
| virtual ossimGpt | getInverseDeriv (int parmIdx, const ossimDpt &ipos, double hdelta=1e-11) |
| virtual ossimSensorModel::CovMatStatus | getObsCovMat (const ossimDpt &ipos, NEWMAT::SymmetricMatrix &Cov, const ossim_float64 defPointingSigma=0.5) const |
| Gives 2X2 covariance matrix of observations. More... | |
| virtual bool | isAffectedByElevation () const |
| Implementation of pure virtual ossimProjection::isAffectedByElevation method. More... | |
| void | computeGsd () |
| This method computes the ground sample distance(gsd) and sets class attributes theGSD and theMeanGSD by doing a lineSampleHeightToWorld on four points and calculating the distance from them. More... | |
| virtual bool | getImageGeometry (const ossimString &, const ossimString &, ossimKeywordlist &) const |
| Extracts geometry info from a non-ossim key,value pair to an ossim keyword list. More... | |
| Public Member Functions inherited from ossimProjection | |
| ossimProjection () | |
| virtual | ~ossimProjection () |
| virtual ossimDpt | forward (const ossimGpt &wp) const |
| virtual ossimGpt | inverse (const ossimDpt &pp) const |
| virtual void | getRoundTripError (const ossimDpt &imagePoint, ossimDpt &errorResult) const |
| virtual void | getRoundTripError (const ossimGpt &groundPoint, ossimDpt &errorResult) const |
| virtual void | getGroundClipPoints (ossimGeoPolygon &gpts) const |
| virtual bool | isEqualTo (const ossimObject &obj, ossimCompareType compareType=OSSIM_COMPARE_FULL) const |
| virtual bool | operator!= (const ossimProjection &projection) const |
| Public Member Functions inherited from ossimObject | |
| ossimObject () | |
| virtual | ~ossimObject () |
| virtual ossimString | getShortName () const |
| virtual ossimString | getLongName () const |
| virtual ossimString | getDescription () const |
| virtual RTTItypeid | getType () const |
| virtual bool | canCastTo (ossimObject *obj) const |
| virtual bool | canCastTo (const RTTItypeid &id) const |
| virtual bool | canCastTo (const ossimString &parentClassName) const |
| virtual void | accept (ossimVisitor &visitor) |
| Public Member Functions inherited from ossimReferenced | |
| ossimReferenced () | |
| ossimReferenced (const ossimReferenced &) | |
| ossimReferenced & | operator= (const ossimReferenced &) |
| void | ref () const |
| increment the reference count by one, indicating that this object has another pointer which is referencing it. More... | |
| void | unref () const |
| decrement the reference count by one, indicating that a pointer to this object is referencing it. More... | |
| void | unref_nodelete () const |
| decrement the reference count by one, indicating that a pointer to this object is referencing it. More... | |
| int | referenceCount () const |
| Public Member Functions inherited from ossimErrorStatusInterface | |
| ossimErrorStatusInterface () | |
| virtual | ~ossimErrorStatusInterface () |
| virtual ossimErrorCode | getErrorStatus () const |
| virtual ossimString | getErrorStatusString () const |
| virtual void | setErrorStatus (ossimErrorCode error_status) const |
| virtual void | setErrorStatus () const |
| virtual void | clearErrorStatus () const |
| bool | hasError () const |
| Public Member Functions inherited from ossimOptimizableProjection | |
| ossimOptimizableProjection () | |
| ossimOptimizableProjection (const ossimOptimizableProjection &source) | |
| virtual | ~ossimOptimizableProjection () |
| virtual ossimOptimizableProjection & | operator= (const ossimOptimizableProjection &source) |
| virtual bool | setupOptimizer (const ossimString &setup) |
| setupFromString() Derived classes should implement as needed. Initialize parameters needed for optimizeFit and degreesOfFreedom More... | |
| Public Member Functions inherited from ossimAdjustableParameterInterface | |
| ossimAdjustableParameterInterface () | |
| ossimAdjustableParameterInterface (const ossimAdjustableParameterInterface &rhs) | |
| virtual | ~ossimAdjustableParameterInterface () |
| void | newAdjustment (ossim_uint32 numberOfParameters=0) |
| void | setAdjustmentDescription (const ossimString &description) |
| ossimString | getAdjustmentDescription () const |
| ossimString | getAdjustmentDescription (ossim_uint32 adjustmentIdx) const |
| Returns adjustmentDescription of specific adjustmentInfo. More... | |
| void | setCurrentAdjustment (ossim_uint32 adjustmentIndex, bool notify=false) |
| bool | setCurrentAdjustment (const ossimString &description, bool notify=false) |
| Sets the current adjustment to the adjustment with a matching description. More... | |
| void | eraseAdjustment (bool notify) |
| void | eraseAdjustment (ossim_uint32 idx, bool notify) |
| virtual void | initAdjustableParameters () |
| void | resetAdjustableParameters (bool notify=false) |
| void | copyAdjustment (ossim_uint32 idx, bool notify) |
| void | copyAdjustment (bool notify=false) |
| void | keepAdjustment (ossim_uint32 idx, bool createCopy) |
| virtual void | keepAdjustment (bool createCopy=true) |
| const ossimAdjustableParameterInterface & | operator= (const ossimAdjustableParameterInterface &rhs) |
| void | removeAllAdjustments () |
| ossim_uint32 | getNumberOfAdjustableParameters () const |
| double | getAdjustableParameter (ossim_uint32 idx) const |
| virtual void | setAdjustableParameter (ossim_uint32 idx, double value, bool notify=false) |
| virtual void | setAdjustableParameter (ossim_uint32 idx, double value, double sigma, bool notify=false) |
| double | getParameterSigma (ossim_uint32 idx) const |
| void | setParameterSigma (ossim_uint32 idx, double value, bool notify=false) |
| ossimUnitType | getParameterUnit (ossim_uint32 idx) const |
| void | setParameterUnit (ossim_uint32 idx, ossimUnitType unit) |
| void | setParameterUnit (ossim_uint32 idx, const ossimString &unit) |
| void | setParameterCenter (ossim_uint32 idx, double center, bool notify=false) |
| double | getParameterCenter (ossim_uint32 idx) const |
| double | computeParameterOffset (ossim_uint32 idx) const |
| void | setParameterOffset (ossim_uint32 idx, ossim_float64 value, bool notify=false) |
| ossimString | getParameterDescription (ossim_uint32 idx) const |
| void | setParameterDescription (ossim_uint32 idx, const ossimString &descrption) |
| ossim_int32 | findParameterIdxGivenDescription (ossim_uint32 adjustmentIdx, const ossimString &name) const |
| ossim_int32 | findParameterIdxContainingDescription (ossim_uint32 adjustmentIdx, const ossimString &name) const |
| bool | isParameterLocked (ossim_uint32 idx) const |
| void | setParameterLockFlag (ossim_uint32 idxParam, bool flag) |
| bool | getParameterLockFlag (ossim_uint32 idx) const |
| void | lockAllParametersCurrentAdjustment () |
| void | unlockAllParametersCurrentAdjustment () |
| void | lockAllParameters (ossim_uint32 idxAdjustment) |
| void | unlockAllParameters (ossim_uint32 idxAdjustment) |
| void | resizeAdjustableParameterArray (ossim_uint32 numberOfParameters) |
| void | setAdjustment (const ossimAdjustmentInfo &adj, bool notify=false) |
| void | setAdjustment (ossim_uint32 idx, const ossimAdjustmentInfo &adj, bool notify=false) |
| void | addAdjustment (const ossimAdjustmentInfo &adj, bool notify) |
| void | getAdjustment (ossimAdjustmentInfo &adj) const |
| void | getAdjustment (ossim_uint32 idx, ossimAdjustmentInfo &adj) const |
| ossim_uint32 | getNumberOfAdjustments () const |
| ossim_uint32 | getCurrentAdjustmentIdx () const |
| void | setDirtyFlag (bool flag=true) |
| void | setAllDirtyFlag (bool flag=true) |
| bool | hasDirtyAdjustments () const |
| virtual void | saveCurrentAdjustmentOnly (ossimKeywordlist &kwl, const ossimString &prefix=ossimString("")) |
| Saves the current active adjustment to the KWL file. More... | |
| bool | saveAdjustments (ossimKeywordlist &kwl, const ossimString &prefix=ossimString("")) const |
| Save all adjustments to the KWL file. More... | |
| bool | loadAdjustments (const ossimKeywordlist &kwl, const ossimString &prefix=ossimString("")) |
| std::ostream & | print (std::ostream &out) const |
| Dumps the currently active adjustment to ostream. More... | |
Private Member Functions | |
| virtual bool | InitPlatformPosition (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Platform Position from a projection keywordlist. More... | |
| virtual bool | InitSensorParams (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Sensor Params from a projection keywordlist. More... | |
| virtual bool | InitRefPoint (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Reference Point from a projection keywordlist. More... | |
| virtual bool | InitSRGR (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Slant Range for each Ground Range data sets : _n_srgr,_srgr_coefset,_srgr_update,_pixel_spacing,_isProductGeoreferenced. More... | |
| virtual bool | internalSaveState (ossimKeywordlist &kwl, const char *prefix=0) const |
| Method to save object state to a keyword list. More... | |
| virtual bool | internalLoadState (const ossimKeywordlist &kwl, const char *prefix=0) |
| Method to the load (recreate) the state of the object from a keyword list. More... | |
| int | FindSRGRSetNumber (JSDDateTime date) const |
| Finds the SRGR data set which update time is the closest to the center scene time. More... | |
Additional Inherited Members | |
| Public Types inherited from ossimSensorModel | |
| enum | CovMatStatus { COV_INVALID = 0, COV_PARTIAL = 1, COV_FULL = 2 } |
| enum | DeriveMode { OBS_INIT =-99, EVALUATE =-98, P_WRT_X = -1, P_WRT_Y = -2, P_WRT_Z = -3 } |
| Static Public Member Functions inherited from ossimSensorModel | |
| static void | writeGeomTemplate (ostream &os) |
| Static Public Attributes inherited from ossimplugins::ossimGeometricSarSensorModel | |
| static const char * | CREATE_OCG_PREF_KW = "geometric_sar_sensor_model.create_ocg" |
| Protected Member Functions inherited from ossimplugins::ossimGeometricSarSensorModel | |
| bool | createReplacementOCG () |
| Creates replacement coarse grid model if user requested via ossim preferences keyword "geometric_sar_sensor_model.create_ocg: <bool>". More... | |
| Protected Member Functions inherited from ossimSensorModel | |
| virtual | ~ossimSensorModel () |
| virtual ossimDpt | extrapolate (const ossimGpt &gp) const |
| virtual ossimGpt | extrapolate (const ossimDpt &ip, const double &height=ossim::nan()) const |
| void | buildNormalEquation (const ossimTieGptSet &tieSet, NEWMAT::SymmetricMatrix &A, NEWMAT::ColumnVector &residue, NEWMAT::ColumnVector &projResidue, double pstep_scale) |
| NEWMAT::ColumnVector | getResidue (const ossimTieGptSet &tieSet) |
| NEWMAT::ColumnVector | solveLeastSquares (NEWMAT::SymmetricMatrix &A, NEWMAT::ColumnVector &r) const |
| NEWMAT::Matrix | invert (const NEWMAT::Matrix &m) const |
| stable invert stolen from ossimRpcSolver More... | |
| Protected Member Functions inherited from ossimReferenced | |
| virtual | ~ossimReferenced () |
| Protected Member Functions inherited from ossimAdjustableParameterInterface | |
| bool | paramChanged (ossim_uint32 param_idx) const |
| Returns true if specified parameter has been modified since last setAllChangeFlag(false) call. More... | |
| void | setAllChangeFlags (bool areChanged) |
| Sets all the change flags to the boolean indicated to indicate parameters are changed (TRUE) or not (FALSE). More... | |
| void | initChangeFlags () |
| Initializes the change flags to TRUE. More... | |
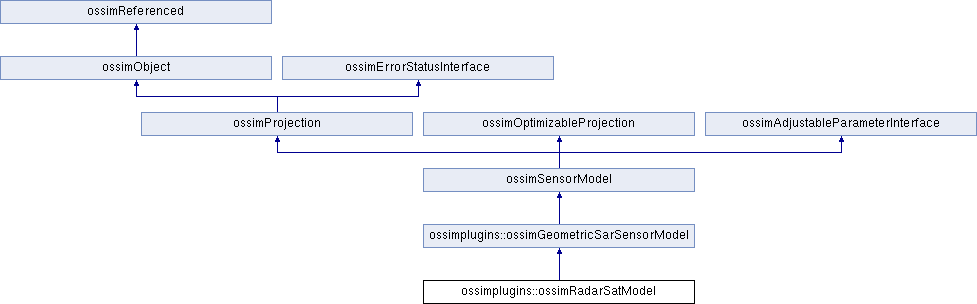
Detailed Description
This class is able to direct localisation and indirect localisation using the RadarSat sensor model.
Definition at line 40 of file ossimRadarSatModel.h.
Constructor & Destructor Documentation
◆ ossimRadarSatModel() [1/2]
| ossimplugins::ossimRadarSatModel::ossimRadarSatModel | ( | ) |
Constructor.
Definition at line 48 of file ossimRadarSatModel.cpp.
Referenced by dup().
◆ ossimRadarSatModel() [2/2]
| ossimplugins::ossimRadarSatModel::ossimRadarSatModel | ( | const ossimRadarSatModel & | rhs | ) |
copy constructor
Definition at line 59 of file ossimRadarSatModel.cpp.
◆ ~ossimRadarSatModel()
|
virtual |
Destructor.
Definition at line 70 of file ossimRadarSatModel.cpp.
References _data, _leader, _trailer, and _volumeDir.
Member Function Documentation
◆ dup()
|
virtual |
Returns pointer to a new instance, copy of this.
Implements ossimProjection.
Definition at line 93 of file ossimRadarSatModel.cpp.
References ossimRadarSatModel().
◆ FindSRGRSetNumber()
|
private |
Finds the SRGR data set which update time is the closest to the center scene time.
Definition at line 1210 of file ossimRadarSatModel.cpp.
References _n_srgr, _srgr_update, ossimplugins::JSDDateTime::get_decimal(), and ossimplugins::JSDDateTime::get_second().
Referenced by getSlantRangeFromGeoreferenced().
◆ getClassName()
|
virtual |
Method to return the class name.
- Returns
- The name of this class.
Reimplemented from ossimObject.
Definition at line 98 of file ossimRadarSatModel.cpp.
Referenced by loadState().
◆ getSlantRangeFromGeoreferenced()
|
virtual |
This function associates an image column number to a slant range when the image is georeferenced (ground projected)
- Parameters
-
col Column coordinate of the image point
- Todo:
- : could be improved (date choice)
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 103 of file ossimRadarSatModel.cpp.
References _n_srgr, _pixel_spacing, ossimplugins::ossimGeometricSarSensorModel::_refPoint, ossimplugins::ossimGeometricSarSensorModel::_sensor, _srgr_coefset, FindSRGRSetNumber(), ossimplugins::SensorParams::get_col_direction(), ossimplugins::RefPoint::get_distance(), ossimplugins::RefPoint::get_ephemeris(), and ossimplugins::RefPoint::get_pix_col().
◆ InitPlatformPosition()
|
privatevirtual |
Initializes the Platform Position from a projection keywordlist.
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 799 of file ossimRadarSatModel.cpp.
References ossimplugins::ossimGeometricSarSensorModel::_platformPosition, ossimplugins::GMSTDateTime::AN2000, ossimplugins::CivilDateTime::AsGMSTDateTime(), ossimplugins::JSDDateTime::AsGMSTDateTime(), ossimKeywordlist::find(), ossimplugins::JSDDateTime::get_second(), ossimplugins::GMSTDateTime::get_tms(), ossimplugins::JSDDateTime::NormDate(), ossimplugins::CivilDateTime::set_day(), ossimplugins::CivilDateTime::set_decimal(), ossimplugins::CivilDateTime::set_month(), ossimplugins::GMSTDateTime::set_origine(), ossimplugins::JSDDateTime::set_second(), ossimplugins::CivilDateTime::set_second(), ossimplugins::CivilDateTime::set_year(), and ossimplugins::GalileanEphemeris::ToGeographic().
Referenced by internalLoadState().
◆ InitRefPoint()
|
privatevirtual |
Initializes the Reference Point from a projection keywordlist.
- Todo:
- : effacer
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 930 of file ossimRadarSatModel.cpp.
References ossimplugins::ossimGeometricSarSensorModel::_isProductGeoreferenced, _pixel_spacing, ossimplugins::ossimGeometricSarSensorModel::_platformPosition, ossimplugins::ossimGeometricSarSensorModel::_refPoint, ossimplugins::ossimGeometricSarSensorModel::_sensor, distance(), ossimKeywordlist::find(), ossimplugins::SensorParams::get_nRangeLook(), ossimplugins::RefPoint::get_pix_col(), ossimplugins::SensorParams::get_prf(), ossimplugins::SensorParams::get_sf(), ossimplugins::PlatformPosition::Interpolate(), min, ossimplugins::ossimGeometricSarSensorModel::optimizeModel(), ossimplugins::RefPoint::set_distance(), ossimplugins::RefPoint::set_ephemeris(), ossimplugins::SensorParams::set_nAzimuthLook(), ossimplugins::RefPoint::set_pix_col(), ossimplugins::RefPoint::set_pix_line(), ossimSensorModel::theImageClipRect, ossimSensorModel::theImageSize, ossimIpt::x, and ossimIpt::y.
Referenced by internalLoadState().
◆ InitSensorParams()
|
privatevirtual |
Initializes the Sensor Params from a projection keywordlist.
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 718 of file ossimRadarSatModel.cpp.
References ossimplugins::ossimGeometricSarSensorModel::_sensor, ossimKeywordlist::find(), ossimplugins::SensorParams::Left, ossimplugins::SensorParams::Right, ossimplugins::SensorParams::set_col_direction(), ossimplugins::SensorParams::set_lin_direction(), ossimplugins::SensorParams::set_nAzimuthLook(), ossimplugins::SensorParams::set_nRangeLook(), ossimplugins::SensorParams::set_prf(), ossimplugins::SensorParams::set_rwl(), ossimplugins::SensorParams::set_semiMajorAxis(), ossimplugins::SensorParams::set_semiMinorAxis(), ossimplugins::SensorParams::set_sf(), ossimplugins::SensorParams::set_sightDirection(), and ossimString::trim().
Referenced by internalLoadState().
◆ InitSRGR()
|
privatevirtual |
Initializes the Slant Range for each Ground Range data sets : _n_srgr,_srgr_coefset,_srgr_update,_pixel_spacing,_isProductGeoreferenced.
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 1121 of file ossimRadarSatModel.cpp.
References ossimplugins::ossimGeometricSarSensorModel::_isProductGeoreferenced, _n_srgr, _pixel_spacing, _srgr_coefset, _srgr_update, ossimKeywordlist::find(), and min.
Referenced by internalLoadState().
◆ internalLoadState()
|
privatevirtual |
Method to the load (recreate) the state of the object from a keyword list.
Return true if ok or false on error.
- Returns
- true if load OK, false on error
Definition at line 659 of file ossimRadarSatModel.cpp.
References InitPlatformPosition(), InitRefPoint(), InitSensorParams(), InitSRGR(), ossimNotify(), and ossimNotifyLevel_DEBUG.
Referenced by loadState(), and open().
◆ internalSaveState()
|
privatevirtual |
Method to save object state to a keyword list.
- Parameters
-
kwl Keyword list to save to. prefix added to keys when saved.
- Returns
- true on success, false on error.
Definition at line 430 of file ossimRadarSatModel.cpp.
References _data, _leader, _trailer, ossimKeywordlist::add(), ossimplugins::ProcessedDataRecord::get_acq_msec(), ossimplugins::DataSetSummary::get_alt_dopcen(), ossimplugins::DataSetSummary::get_asc_des(), ossimplugins::DataSetSummary::get_bnd_azi(), ossimplugins::DataSetSummary::get_bnd_azilok(), ossimplugins::DataSetSummary::get_bnd_rng(), ossimplugins::DataSetSummary::get_bnd_rnglok(), ossimplugins::DataSetSummary::get_crt_dopcen(), ossimplugins::PlatformPositionData::get_data_int(), ossimplugins::Trailer::get_DataSetSummary(), ossimplugins::Leader::get_DataSetSummary(), ossimplugins::PlatformPositionData::get_day(), ossimplugins::DataSetSummary::get_ellip_des(), ossimplugins::DataSetSummary::get_ellip_maj(), ossimplugins::DataSetSummary::get_ellip_min(), ossimplugins::DataSetSummary::get_fa(), ossimplugins::FileDescriptor::get_file_name(), ossimplugins::Leader::get_FileDescriptor(), ossimplugins::Data::get_FirstProcessedDataRecord(), ossimplugins::DataSetSummary::get_fr(), ossimplugins::PlatformPositionData::get_gmt_sec(), ossimplugins::PlatformPositionData::get_hr_angle(), ossimplugins::Data::get_ImageOptionsFileDescriptor(), ossimplugins::DataSetSummary::get_inp_sctim(), ossimplugins::Data::get_LastProcessedDataRecord(), ossimplugins::ProcessedDataRecord::get_lat_first(), ossimplugins::ProcessedDataRecord::get_lat_last(), ossimplugins::DataSetSummary::get_line_spacing(), ossimplugins::ProcessedDataRecord::get_lon_first(), ossimplugins::ProcessedDataRecord::get_lon_last(), ossimplugins::PlatformPositionData::get_month(), ossimplugins::DataSetSummary::get_n_azilok(), ossimplugins::DataSetSummary::get_n_rnglok(), ossimplugins::ProcessingParameters::get_n_srgr(), ossimplugins::PlatformPositionData::get_ndata(), ossimplugins::ImageOptionsFileDescriptor::get_ngrp(), ossimplugins::ImageOptionsFileDescriptor::get_nlin(), ossimplugins::ProcessingParameters::get_pixel_spacing(), ossimplugins::DataSetSummary::get_plat_head(), ossimplugins::DataSetSummary::get_plat_lat(), ossimplugins::DataSetSummary::get_plat_long(), ossimplugins::Leader::get_PlatformPositionData(), ossimplugins::PlatformPositionData::get_pos_vect(), ossimplugins::DataSetSummary::get_pro_head(), ossimplugins::DataSetSummary::get_pro_lat(), ossimplugins::DataSetSummary::get_pro_long(), ossimplugins::Trailer::get_ProcessingParameters(), ossimplugins::Leader::get_ProcessingParameters(), ossimplugins::DataSetSummary::get_rng_gate(), ossimplugins::DataSetSummary::get_sc_lin(), ossimplugins::DataSetSummary::get_sc_pix(), ossimplugins::ProcessingParameters::get_sens_orient(), ossimplugins::ProcessingParameters::get_srgr_coefset(), ossimplugins::DataSetSummary::get_terrain_h(), ossimplugins::DataSetSummary::get_time_dir_lin(), ossimplugins::DataSetSummary::get_time_dir_pix(), ossimplugins::DataSetSummary::get_wave_length(), ossimplugins::PlatformPositionData::get_year(), ossimNotify(), ossimNotifyLevel_DEBUG, and ossimKeywordNames::TYPE_KW.
Referenced by open(), and saveState().
◆ loadState()
|
virtual |
Method to the load (recreate) the state of the object from a keyword list.
Return true if ok or false on error.
- Returns
- true if load OK, false on error
Reimplemented from ossimplugins::ossimGeometricSarSensorModel.
Definition at line 680 of file ossimRadarSatModel.cpp.
References ossimKeywordlist::find(), getClassName(), internalLoadState(), ossimNotify(), ossimNotifyLevel_DEBUG, and ossimKeywordNames::TYPE_KW.
◆ open()
| bool ossimplugins::ossimRadarSatModel::open | ( | const ossimFilename & | file | ) |
Method to intantial model from a file.
- Parameters
-
file
- Returns
- true on success, false on error.
Definition at line 127 of file ossimRadarSatModel.cpp.
References _data, _leader, _trailer, _volumeDir, ossimString::c_str(), ossimFilename::exists(), ossimString::find(), ossimplugins::RadarSatRecordFactory::Instanciate(), internalLoadState(), internalSaveState(), ossimplugins::ossimGeometricSarSensorModel::lineSampleToWorld(), ossimDrect::ll(), ossimDrect::lr(), ossimNotify(), ossimNotifyLevel_DEBUG, ossimplugins::RadarSatRecord::Read(), ossimSensorModel::setGroundRect(), ossimSensorModel::theImageClipRect, ossimDrect::ul(), and ossimDrect::ur().
◆ saveState()
|
virtual |
Method to save object state to a keyword list.
- Parameters
-
kwl Keyword list to save to. prefix added to keys when saved.
- Returns
- true on success, false on error.
Reimplemented from ossimplugins::ossimGeometricSarSensorModel.
Definition at line 646 of file ossimRadarSatModel.cpp.
References internalSaveState(), and ossimplugins::ossimGeometricSarSensorModel::saveState().
Member Data Documentation
◆ _data
|
protected |
List of metadata contained in the Data file.
Definition at line 116 of file ossimRadarSatModel.h.
Referenced by internalSaveState(), open(), and ~ossimRadarSatModel().
◆ _leader
|
protected |
List of metadata contained in the Leader file.
Definition at line 121 of file ossimRadarSatModel.h.
Referenced by internalSaveState(), open(), and ~ossimRadarSatModel().
◆ _n_srgr
|
protected |
Slant Range for each Ground Range (SRGR) number of coefficients sets.
Definition at line 99 of file ossimRadarSatModel.h.
Referenced by FindSRGRSetNumber(), getSlantRangeFromGeoreferenced(), and InitSRGR().
◆ _pixel_spacing
|
protected |
Pixel spacing.
Definition at line 111 of file ossimRadarSatModel.h.
Referenced by getSlantRangeFromGeoreferenced(), InitRefPoint(), and InitSRGR().
◆ _srgr_coefset
|
protected |
SRGR coefficient sets.
Definition at line 103 of file ossimRadarSatModel.h.
Referenced by getSlantRangeFromGeoreferenced(), and InitSRGR().
◆ _srgr_update
|
protected |
SRGR coefficient sets update times.
Definition at line 107 of file ossimRadarSatModel.h.
Referenced by FindSRGRSetNumber(), and InitSRGR().
◆ _trailer
|
protected |
List of metadata contained in the Trailer file.
Definition at line 126 of file ossimRadarSatModel.h.
Referenced by internalSaveState(), open(), and ~ossimRadarSatModel().
◆ _volumeDir
|
protected |
List of metadata contained in the Volume Directory file.
Definition at line 131 of file ossimRadarSatModel.h.
Referenced by open(), and ~ossimRadarSatModel().
The documentation for this class was generated from the following files:
