This class allows for direct localisation and indirect localisation using the TerraSar sensor model. More...
#include <ossimTerraSarModel.h>
Public Member Functions | |
| ossimTerraSarModel () | |
| default constructor More... | |
| ossimTerraSarModel (const ossimTerraSarModel &rhs) | |
| copy constructor More... | |
| virtual | ~ossimTerraSarModel () |
| Destructor. More... | |
| virtual ossimString | getClassName () const |
| Method to return the class name. More... | |
| virtual ossimObject * | dup () const |
| Returns pointer to a new instance, copy of this. More... | |
| virtual double | getSlantRangeFromGeoreferenced (double col) const |
| This function associates an image column number to a slant range when the image is georeferenced (ground projected). More... | |
| bool | open (const ossimFilename &file) |
| Method to intantial model from a file. More... | |
| virtual bool | saveState (ossimKeywordlist &kwl, const char *prefix=0) const |
| Method to save object state to a keyword list. More... | |
| virtual bool | loadState (const ossimKeywordlist &kwl, const char *prefix=0) |
| Method to the load (recreate) the state of the object from a keyword list. More... | |
| virtual std::ostream & | print (std::ostream &out) const |
| void | printInfo (ostream &os) const |
 Public Member Functions inherited from ossimplugins::ossimGeometricSarSensorModel Public Member Functions inherited from ossimplugins::ossimGeometricSarSensorModel | |
| ossimGeometricSarSensorModel () | |
| default constructor More... | |
| ossimGeometricSarSensorModel (const ossimGeometricSarSensorModel &rhs) | |
| copy constructor More... | |
| virtual | ~ossimGeometricSarSensorModel () |
| Destructor. More... | |
| virtual double | getSlantRange (double col) const |
| This function associates an image column number to a slant range. More... | |
| virtual JSDDateTime | getTime (double line) const |
| This function associates an image line number to an azimuth time. More... | |
| virtual bool | getPlatformPositionAtLine (double line, vector< double > &position, vector< double > &speed) |
| This function associates an image line number to a platform position and speed. More... | |
| virtual void | lineSampleHeightToWorld (const ossimDpt &image_point, const double &heightEllipsoid, ossimGpt &worldPoint) const |
| This function is able to convert image coordinates into world coordinates the geometric model of SAR sensors. More... | |
| virtual bool | optimizeModel (const std::list< ossimGpt > &groundCoordinates, const std::list< ossimDpt > &imageCoordinates) |
| This function optimizes the model according to a list of Ground Control Points. More... | |
| virtual void | clearGCPlist () |
| Clears _optimizationGCPsGroundCoordinates and _optimizationGCPsImageCoordinates attributes Updates the optimisation factors and bias. More... | |
| virtual void | getGCPlist (std::list< ossimGpt > &groundCoordinates, std::list< ossimDpt > &imageCoordinates) |
| Returns _optimizationGCPsGroundCoordinates and _optimizationGCPsImageCoordinates attributes. More... | |
| virtual bool | useForward () const |
| double | get_optimizationFactorX () const |
| Accessors to the optimization parameters. More... | |
| double | get_optimizationFactorY () const |
| double | get_optimizationBiasX () const |
| double | get_optimizationBiasY () const |
| ossimRefPtr< ossimCoarseGridModel > | getReplacementOcgModel () |
| virtual void | lineSampleToWorld (const ossimDpt &image_point, ossimGpt &gpt) const |
| void | set_platformPosition (PlatformPosition *platformPosition) |
| Accessors to the plateform, sensor parameters and reference point. More... | |
| void | set_sensorParams (SensorParams *sensorParams) |
| void | set_refPoint (RefPoint *refPoint) |
| PlatformPosition * | get_platformPosition () const |
| SensorParams * | get_sensorParams () const |
| RefPoint * | get_refPoint () const |
| Public Member Functions inherited from ossimSensorModel | |
| ossimSensorModel () | |
| ossimSensorModel (const ossimSensorModel ©_this) | |
| ossimSensorModel (const ossimKeywordlist &geom_kwl) | |
| const ossimSensorModel & | operator= (const ossimSensorModel &rhs) |
| assignment operator More... | |
| virtual ossimObject * | getBaseObject () |
| virtual const ossimObject * | getBaseObject () const |
| virtual ossimGpt | origin () const |
| virtual ossimDpt | getMetersPerPixel () const |
| virtual const double & | getNominalPosError () const |
| Returns the estimated Absolute horizontal position error (CE90) of the sensor model. More... | |
| virtual const double & | getRelativePosError () const |
| Returns the estimated RELATIVE horizontal position error (CE90) of the sensor model. More... | |
| virtual void | setNominalPosError (const double &ce90) |
| Assigns the absolute image position error uncertainty (abs CE90) More... | |
| virtual void | setRelativePosError (const double &ce90) |
| Assigns the relative image position error uncertainty (rel CE90) More... | |
| virtual void | worldToLineSample (const ossimGpt &world_point, ossimDpt &image_point) const |
| virtual void | imagingRay (const ossimDpt &image_point, ossimEcefRay &image_ray) const |
| void | setRefImgPt (const ossimDpt &pt) |
| Sets the center line sampe of the image. More... | |
| void | setRefGndPt (const ossimGpt &pt) |
| Sets the center latitude, longitude, height of the image. More... | |
| void | setImageRect (const ossimDrect &imageRect) |
| void | setGroundRect (const ossimGpt &ul, const ossimGpt &ur, const ossimGpt &lr, const ossimGpt &ll) |
| ossimDpt | imageSize () const |
| void | setImageSize (const ossimDpt &size) |
| virtual void | adjustableParametersChanged () |
| virtual void | updateModel () |
| virtual bool | insideImage (const ossimDpt &p) const |
| virtual bool | operator== (const ossimProjection &proj) const |
| const ossimString & | getImageID () const |
| Access methods: More... | |
| const ossimDrect & | getImageClipRect () const |
| virtual ossim_uint32 | degreesOfFreedom () const |
| virtual bool | needsInitialState () const |
| needsInitialState() More... | |
| virtual double | optimizeFit (const ossimTieGptSet &tieSet, double *targetVariance=0) |
| virtual ossimDpt | getForwardDeriv (int parmIdx, const ossimGpt &gpos, double hdelta=1e-11) |
| virtual ossimGpt | getInverseDeriv (int parmIdx, const ossimDpt &ipos, double hdelta=1e-11) |
| virtual ossimSensorModel::CovMatStatus | getObsCovMat (const ossimDpt &ipos, NEWMAT::SymmetricMatrix &Cov, const ossim_float64 defPointingSigma=0.5) const |
| Gives 2X2 covariance matrix of observations. More... | |
| virtual bool | isAffectedByElevation () const |
| Implementation of pure virtual ossimProjection::isAffectedByElevation method. More... | |
| void | computeGsd () |
| This method computes the ground sample distance(gsd) and sets class attributes theGSD and theMeanGSD by doing a lineSampleHeightToWorld on four points and calculating the distance from them. More... | |
| virtual bool | getImageGeometry (const ossimString &, const ossimString &, ossimKeywordlist &) const |
| Extracts geometry info from a non-ossim key,value pair to an ossim keyword list. More... | |
| Public Member Functions inherited from ossimProjection | |
| ossimProjection () | |
| virtual | ~ossimProjection () |
| virtual ossimDpt | forward (const ossimGpt &wp) const |
| virtual ossimGpt | inverse (const ossimDpt &pp) const |
| virtual void | getRoundTripError (const ossimDpt &imagePoint, ossimDpt &errorResult) const |
| virtual void | getRoundTripError (const ossimGpt &groundPoint, ossimDpt &errorResult) const |
| virtual void | getGroundClipPoints (ossimGeoPolygon &gpts) const |
| virtual bool | isEqualTo (const ossimObject &obj, ossimCompareType compareType=OSSIM_COMPARE_FULL) const |
| virtual bool | operator!= (const ossimProjection &projection) const |
| Public Member Functions inherited from ossimObject | |
| ossimObject () | |
| virtual | ~ossimObject () |
| virtual ossimString | getShortName () const |
| virtual ossimString | getLongName () const |
| virtual ossimString | getDescription () const |
| virtual RTTItypeid | getType () const |
| virtual bool | canCastTo (ossimObject *obj) const |
| virtual bool | canCastTo (const RTTItypeid &id) const |
| virtual bool | canCastTo (const ossimString &parentClassName) const |
| virtual void | accept (ossimVisitor &visitor) |
| Public Member Functions inherited from ossimReferenced | |
| ossimReferenced () | |
| ossimReferenced (const ossimReferenced &) | |
| ossimReferenced & | operator= (const ossimReferenced &) |
| void | ref () const |
| increment the reference count by one, indicating that this object has another pointer which is referencing it. More... | |
| void | unref () const |
| decrement the reference count by one, indicating that a pointer to this object is referencing it. More... | |
| void | unref_nodelete () const |
| decrement the reference count by one, indicating that a pointer to this object is referencing it. More... | |
| int | referenceCount () const |
| Public Member Functions inherited from ossimErrorStatusInterface | |
| ossimErrorStatusInterface () | |
| virtual | ~ossimErrorStatusInterface () |
| virtual ossimErrorCode | getErrorStatus () const |
| virtual ossimString | getErrorStatusString () const |
| virtual void | setErrorStatus (ossimErrorCode error_status) const |
| virtual void | setErrorStatus () const |
| virtual void | clearErrorStatus () const |
| bool | hasError () const |
| Public Member Functions inherited from ossimOptimizableProjection | |
| ossimOptimizableProjection () | |
| ossimOptimizableProjection (const ossimOptimizableProjection &source) | |
| virtual | ~ossimOptimizableProjection () |
| virtual ossimOptimizableProjection & | operator= (const ossimOptimizableProjection &source) |
| virtual bool | setupOptimizer (const ossimString &setup) |
| setupFromString() Derived classes should implement as needed. Initialize parameters needed for optimizeFit and degreesOfFreedom More... | |
| Public Member Functions inherited from ossimAdjustableParameterInterface | |
| ossimAdjustableParameterInterface () | |
| ossimAdjustableParameterInterface (const ossimAdjustableParameterInterface &rhs) | |
| virtual | ~ossimAdjustableParameterInterface () |
| void | newAdjustment (ossim_uint32 numberOfParameters=0) |
| void | setAdjustmentDescription (const ossimString &description) |
| ossimString | getAdjustmentDescription () const |
| ossimString | getAdjustmentDescription (ossim_uint32 adjustmentIdx) const |
| Returns adjustmentDescription of specific adjustmentInfo. More... | |
| void | setCurrentAdjustment (ossim_uint32 adjustmentIndex, bool notify=false) |
| bool | setCurrentAdjustment (const ossimString &description, bool notify=false) |
| Sets the current adjustment to the adjustment with a matching description. More... | |
| void | eraseAdjustment (bool notify) |
| void | eraseAdjustment (ossim_uint32 idx, bool notify) |
| virtual void | initAdjustableParameters () |
| void | resetAdjustableParameters (bool notify=false) |
| void | copyAdjustment (ossim_uint32 idx, bool notify) |
| void | copyAdjustment (bool notify=false) |
| void | keepAdjustment (ossim_uint32 idx, bool createCopy) |
| virtual void | keepAdjustment (bool createCopy=true) |
| const ossimAdjustableParameterInterface & | operator= (const ossimAdjustableParameterInterface &rhs) |
| void | removeAllAdjustments () |
| ossim_uint32 | getNumberOfAdjustableParameters () const |
| double | getAdjustableParameter (ossim_uint32 idx) const |
| virtual void | setAdjustableParameter (ossim_uint32 idx, double value, bool notify=false) |
| virtual void | setAdjustableParameter (ossim_uint32 idx, double value, double sigma, bool notify=false) |
| double | getParameterSigma (ossim_uint32 idx) const |
| void | setParameterSigma (ossim_uint32 idx, double value, bool notify=false) |
| ossimUnitType | getParameterUnit (ossim_uint32 idx) const |
| void | setParameterUnit (ossim_uint32 idx, ossimUnitType unit) |
| void | setParameterUnit (ossim_uint32 idx, const ossimString &unit) |
| void | setParameterCenter (ossim_uint32 idx, double center, bool notify=false) |
| double | getParameterCenter (ossim_uint32 idx) const |
| double | computeParameterOffset (ossim_uint32 idx) const |
| void | setParameterOffset (ossim_uint32 idx, ossim_float64 value, bool notify=false) |
| ossimString | getParameterDescription (ossim_uint32 idx) const |
| void | setParameterDescription (ossim_uint32 idx, const ossimString &descrption) |
| ossim_int32 | findParameterIdxGivenDescription (ossim_uint32 adjustmentIdx, const ossimString &name) const |
| ossim_int32 | findParameterIdxContainingDescription (ossim_uint32 adjustmentIdx, const ossimString &name) const |
| bool | isParameterLocked (ossim_uint32 idx) const |
| void | setParameterLockFlag (ossim_uint32 idxParam, bool flag) |
| bool | getParameterLockFlag (ossim_uint32 idx) const |
| void | lockAllParametersCurrentAdjustment () |
| void | unlockAllParametersCurrentAdjustment () |
| void | lockAllParameters (ossim_uint32 idxAdjustment) |
| void | unlockAllParameters (ossim_uint32 idxAdjustment) |
| void | resizeAdjustableParameterArray (ossim_uint32 numberOfParameters) |
| void | setAdjustment (const ossimAdjustmentInfo &adj, bool notify=false) |
| void | setAdjustment (ossim_uint32 idx, const ossimAdjustmentInfo &adj, bool notify=false) |
| void | addAdjustment (const ossimAdjustmentInfo &adj, bool notify) |
| void | getAdjustment (ossimAdjustmentInfo &adj) const |
| void | getAdjustment (ossim_uint32 idx, ossimAdjustmentInfo &adj) const |
| ossim_uint32 | getNumberOfAdjustments () const |
| ossim_uint32 | getCurrentAdjustmentIdx () const |
| void | setDirtyFlag (bool flag=true) |
| void | setAllDirtyFlag (bool flag=true) |
| bool | hasDirtyAdjustments () const |
| virtual void | saveCurrentAdjustmentOnly (ossimKeywordlist &kwl, const ossimString &prefix=ossimString("")) |
| Saves the current active adjustment to the KWL file. More... | |
| bool | saveAdjustments (ossimKeywordlist &kwl, const ossimString &prefix=ossimString("")) const |
| Save all adjustments to the KWL file. More... | |
| bool | loadAdjustments (const ossimKeywordlist &kwl, const ossimString &prefix=ossimString("")) |
| std::ostream & | print (std::ostream &out) const |
| Dumps the currently active adjustment to ostream. More... | |
Private Member Functions | |
| virtual bool | InitPlatformPosition (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Platform Position from a projection keywordlist. More... | |
| virtual bool | InitSensorParams (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Sensor Params from a projection keywordlist. More... | |
| virtual bool | InitRefPoint (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Reference Point from a projection keywordlist. More... | |
| virtual bool | InitSRGR (const ossimKeywordlist &kwl, const char *prefix) |
| Initializes the Slant Range to Ground Range data sets : _SrToGr_R0,_SrToGr_coeffs_number,_SrToGr_exponent,_SrToGr_coeffs,_nbCol. More... | |
| bool | initSRGR (const ossimXmlDocument *xdoc, const ossimTerraSarProductDoc &rsDoc) |
| bool | initPlatformPosition (const ossimXmlDocument *xdoc, const ossimTerraSarProductDoc &rsDoc) |
| bool | initSensorParams (const ossimXmlDocument *xdoc, const ossimTerraSarProductDoc &rsDoc) |
| bool | initRefPoint (const ossimXmlDocument *xdoc, const ossimTerraSarProductDoc &rsDoc) |
| Method to initialize RefPoint object from TerraSAR product xml file. More... | |
| bool | initAcquisitionInfo (const ossimXmlDocument *xdoc, const ossimTerraSarProductDoc &tsDoc) |
| Method to initialize AcquisitionInfo parameters from TerraSAR product xml file. More... | |
| bool | initCalibration (const ossimXmlDocument *xmlDocument, const ossimTerraSarProductDoc &tsDoc) |
| Method to initialize Calibration parameters from TerraSAR product xml file. More... | |
| bool | initSceneCoord (const ossimXmlDocument *xdoc, const ossimTerraSarProductDoc &tsDoc) |
| Method to initialize InfoIncidenceAngle parameters from TerraSAR product xml file. More... | |
| bool | initNoise (const ossimXmlDocument *xmlDocument, const ossimTerraSarProductDoc &tsDoc) |
| Method to initialize ImageNoise parameters from TerraSAR product xml file. More... | |
| bool | getNoiseAtGivenNode (const ossimRefPtr< ossimXmlNode > xmlDocument, ossimplugins::Noise &noise) |
| Method to get ImageNoise parameters from TerraSAR product xml file at a given node. More... | |
| bool | findTSXLeader (const ossimFilename &file, ossimFilename &metadataFile) |
| Method to find the metadata file TerraSAR file (image or xml). More... | |
| bool | getPolLayerFromImageFile (const ossimXmlDocument *xmlDocument, const ossimFilename &imageFilename) |
| Method to find the polLayer from the image file. More... | |
Private Attributes | |
| double | _SrToGr_R0 |
| Slant Range TO Ground Range Projection reference point. More... | |
| std::vector< int > | _SrToGr_exponent |
| Slant Range TO Ground Range Projection exponents. More... | |
| std::vector< double > | _SrToGr_coeffs |
| Slant Range TO Ground Range Projection coefficients. More... | |
| double | _sceneCenterRangeTime |
| Scene Center range time. More... | |
| double | _SrToGr_scaling_factor |
| Slant Range TO Ground Range scaling factor at scene center. More... | |
| std::vector< double > | _alt_srgr_coefset |
| alternative SRGR computation coefficients. More... | |
| ossimString | _productType |
| ProductType. More... | |
| ossimString | _radiometricCorrection |
| RadiometricCorrection. More... | |
| ossimString | _imagingMode |
| ImagingMode (AcquisitionInfo node). More... | |
| ossimString | _acquisitionSensor |
| Sensor (AcquisitionInfo node). More... | |
| ossimString | _lookDirection |
| LookDirection (AcquisitionInfo node). More... | |
| ossimString | _polarisationMode |
| PolarisationMode (AcquisitionInfo node). More... | |
| ossimString | _polLayer |
| PolLayer (AcquisitionInfo node). More... | |
| std::vector< ossimString > | _polLayerList |
| std::vector< Noise > | _noise |
| Noise (Noise node). More... | |
| SceneCoord * | _sceneCoord |
| SceneCoord (SceneInfo node) More... | |
| std::vector< double > | _calFactor |
| CalFactor (Calibration node). More... | |
| double | _radarFrequency |
| centerFrequency (instrument node). More... | |
| ossim_uint32 | _numberOfLayers |
| number of layer (ImageDataInfo node). More... | |
| ossimString | _azStartTime |
| Azimuthal Start Time (Start acquisition time). More... | |
| ossimString | _azStopTime |
| Azimuthal Stop Time (Start acquisition time). More... | |
| ossimString | _rgFirstPixelTime |
| First pixel Range Time (Start acquisition time in range direction). More... | |
| ossimString | _rgLastPixelTime |
| Last pixel Range Time (Start acquisition time in range direction). More... | |
| ossimString | _generationTime |
| Generation time. More... | |
| ossimFilename | theProductXmlFile |
Additional Inherited Members | |
| Public Types inherited from ossimSensorModel | |
| enum | CovMatStatus { COV_INVALID = 0, COV_PARTIAL = 1, COV_FULL = 2 } |
| enum | DeriveMode { OBS_INIT =-99, EVALUATE =-98, P_WRT_X = -1, P_WRT_Y = -2, P_WRT_Z = -3 } |
| Static Public Member Functions inherited from ossimSensorModel | |
| static void | writeGeomTemplate (ostream &os) |
| Static Public Attributes inherited from ossimplugins::ossimGeometricSarSensorModel | |
| static const char * | CREATE_OCG_PREF_KW = "geometric_sar_sensor_model.create_ocg" |
| Protected Member Functions inherited from ossimplugins::ossimGeometricSarSensorModel | |
| bool | createReplacementOCG () |
| Creates replacement coarse grid model if user requested via ossim preferences keyword "geometric_sar_sensor_model.create_ocg: <bool>". More... | |
| Protected Member Functions inherited from ossimSensorModel | |
| virtual | ~ossimSensorModel () |
| virtual ossimDpt | extrapolate (const ossimGpt &gp) const |
| virtual ossimGpt | extrapolate (const ossimDpt &ip, const double &height=ossim::nan()) const |
| void | buildNormalEquation (const ossimTieGptSet &tieSet, NEWMAT::SymmetricMatrix &A, NEWMAT::ColumnVector &residue, NEWMAT::ColumnVector &projResidue, double pstep_scale) |
| NEWMAT::ColumnVector | getResidue (const ossimTieGptSet &tieSet) |
| NEWMAT::ColumnVector | solveLeastSquares (NEWMAT::SymmetricMatrix &A, NEWMAT::ColumnVector &r) const |
| NEWMAT::Matrix | invert (const NEWMAT::Matrix &m) const |
| stable invert stolen from ossimRpcSolver More... | |
| Protected Member Functions inherited from ossimReferenced | |
| virtual | ~ossimReferenced () |
| Protected Member Functions inherited from ossimAdjustableParameterInterface | |
| bool | paramChanged (ossim_uint32 param_idx) const |
| Returns true if specified parameter has been modified since last setAllChangeFlag(false) call. More... | |
| void | setAllChangeFlags (bool areChanged) |
| Sets all the change flags to the boolean indicated to indicate parameters are changed (TRUE) or not (FALSE). More... | |
| void | initChangeFlags () |
| Initializes the change flags to TRUE. More... | |
| Protected Attributes inherited from ossimplugins::ossimGeometricSarSensorModel | |
| PlatformPosition * | _platformPosition |
| Handle the position of the platform. More... | |
| SensorParams * | _sensor |
| RefPoint * | _refPoint |
| SarSensor * | _sarSensor |
| bool | _isProductGeoreferenced |
| True iff the product is ground range. More... | |
| std::list< ossimGpt > | _optimizationGCPsGroundCoordinates |
| List Ground Control Points used by the optimization. More... | |
| std::list< ossimDpt > | _optimizationGCPsImageCoordinates |
| double | _optimizationFactorX |
| Optimization result : linear error correction in both dimensions. More... | |
| double | _optimizationFactorY |
| double | _optimizationBiasX |
| double | _optimizationBiasY |
| ossimFilename | _imageFilename |
| ossimFilename | _productXmlFile |
| ossimRefPtr< ossimCoarseGridModel > | _replacementOcgModel |
| Protected Attributes inherited from ossimSensorModel | |
| ossimIpt | theImageSize |
| ossimDpt | theSubImageOffset |
| ossimString | theImageID |
| ossimString | theSensorID |
| ossimDpt | theGSD |
| ossim_float64 | theMeanGSD |
| ossimGpt | theRefGndPt |
| ossimDpt | theRefImgPt |
| ossimPolygon | theBoundGndPolygon |
| ossimDrect | theImageClipRect |
| ossim_float64 | theRelPosError |
| ossim_float64 | theNominalPosError |
| ossimDpt | theParWRTx |
| Partials for current point. More... | |
| ossimDpt | theParWRTy |
| ossimDpt | theParWRTz |
| ossimDpt | theObs |
| Observations & residuals for current point. More... | |
| ossimDpt | theResid |
| ossimRefPtr< ossimProjection > | theSeedFunction |
| Used as an initial guess for iterative solutions and a guess for points outside the support bounds. More... | |
| bool | theExtrapolateImageFlag |
| bool | theExtrapolateGroundFlag |
| Protected Attributes inherited from ossimErrorStatusInterface | |
| ossimErrorCode | theErrorStatus |
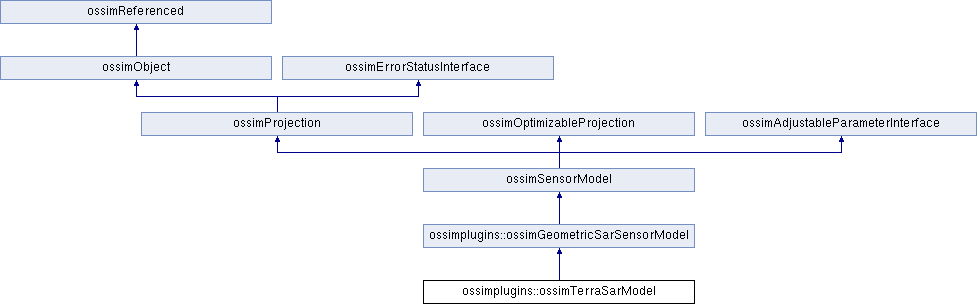
Detailed Description
This class allows for direct localisation and indirect localisation using the TerraSar sensor model.
Definition at line 42 of file ossimTerraSarModel.h.
Constructor & Destructor Documentation
◆ ossimTerraSarModel() [1/2]
| ossimplugins::ossimTerraSarModel::ossimTerraSarModel | ( | ) |
default constructor
Definition at line 74 of file ossimTerraSarModel.cpp.
◆ ossimTerraSarModel() [2/2]
| ossimplugins::ossimTerraSarModel::ossimTerraSarModel | ( | const ossimTerraSarModel & | rhs | ) |
copy constructor
Definition at line 103 of file ossimTerraSarModel.cpp.
References _sceneCoord.
◆ ~ossimTerraSarModel()
|
virtual |
Destructor.
Definition at line 137 of file ossimTerraSarModel.cpp.
Member Function Documentation
◆ dup()
|
virtual |
Returns pointer to a new instance, copy of this.
Implements ossimProjection.
Definition at line 159 of file ossimTerraSarModel.cpp.
◆ findTSXLeader()
|
private |
Method to find the metadata file TerraSAR file (image or xml).
- Parameters
-
file image or metadata path. metadataFile matadata path.
- Returns
- ture if mateadata found, false otherwise.
Definition at line 2373 of file ossimTerraSarModel.cpp.
References ossimString::beforePos(), ossimString::downcase(), ossimString::empty(), ossimFilename::exists(), ossimFilename::ext(), ossimFilename::file(), ossimDirectory::findAllFilesThatMatch(), ossimEnvironmentUtility::getCurrentWorkingDir(), ossimEnvironmentUtility::instance(), ossimNotify(), ossimNotifyLevel_DEBUG, ossimFilename::path(), and ossim_hdf5::print().
◆ getClassName()
|
virtual |
Method to return the class name.
- Returns
- The name of this class.
Reimplemented from ossimObject.
Definition at line 154 of file ossimTerraSarModel.cpp.
◆ getNoiseAtGivenNode()
|
private |
Method to get ImageNoise parameters from TerraSAR product xml file at a given node.
- Parameters
-
xdoc Opened product xml file.
- Returns
- true on success, false on error.
Definition at line 1889 of file ossimTerraSarModel.cpp.
References ossimString::begin(), ossimXmlNode::findChildNodes(), ossimNotify(), ossimNotifyLevel_DEBUG, ossimplugins::Noise::set_imageNoise(), ossimplugins::Noise::set_numberOfNoiseRecords(), ossimplugins::ImageNoise::set_polynomialCoefficients(), ossimplugins::ImageNoise::set_polynomialDegree(), ossimplugins::ImageNoise::set_referencePoint(), ossimplugins::ImageNoise::set_timeUTC(), ossimplugins::ImageNoise::set_validityRangeMax(), and ossimplugins::ImageNoise::set_validityRangeMin().
◆ getPolLayerFromImageFile()
|
private |
Method to find the polLayer from the image file.
- Parameters
-
xdoc Opened product xml file. file image or metadata path.
- Returns
- true on success, false on error.
Definition at line 2180 of file ossimTerraSarModel.cpp.
References ossimString::begin(), ossimString::clear(), ossimFilename::file(), ossimXmlDocument::findNodes(), ossimNotify(), and ossimNotifyLevel_DEBUG.
◆ getSlantRangeFromGeoreferenced()
|
virtual |
This function associates an image column number to a slant range when the image is georeferenced (ground projected).
- Parameters
-
col Column coordinate of the image point
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 169 of file ossimTerraSarModel.cpp.
◆ initAcquisitionInfo()
|
private |
Method to initialize AcquisitionInfo parameters from TerraSAR product xml file.
- Parameters
-
xdoc Opened product xml file.
- Returns
- true on success, false on error.
Definition at line 1758 of file ossimTerraSarModel.cpp.
References ossimplugins::ossimTerraSarProductDoc::geNumberOfLayers(), ossimplugins::ossimTerraSarProductDoc::getAcquisitionSensor(), ossimplugins::ossimTerraSarProductDoc::getImagingMode(), ossimplugins::ossimTerraSarProductDoc::getLookDirection(), ossimplugins::ossimTerraSarProductDoc::getMission(), ossimplugins::ossimTerraSarProductDoc::getPolarisationMode(), ossimplugins::ossimTerraSarProductDoc::getPolLayerList(), ossimNotify(), ossimNotifyLevel_DEBUG, and ossimString::toUInt32().
◆ initCalibration()
|
private |
Method to initialize Calibration parameters from TerraSAR product xml file.
- Parameters
-
xdoc Opened product xml file.
- Returns
- true on success, false on error.
Definition at line 2266 of file ossimTerraSarModel.cpp.
References ossimString::begin(), ossimXmlDocument::findNodes(), ossimNotify(), ossimNotifyLevel_DEBUG, and ossimString::toDouble().
◆ initNoise()
|
private |
Method to initialize ImageNoise parameters from TerraSAR product xml file.
- Parameters
-
xdoc Opened product xml file.
- Returns
- true on success, false on error.
Definition at line 2071 of file ossimTerraSarModel.cpp.
References ossimString::begin(), ossimXmlDocument::findNodes(), ossimNotify(), and ossimNotifyLevel_DEBUG.
◆ InitPlatformPosition()
|
privatevirtual |
Initializes the Platform Position from a projection keywordlist.
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 1078 of file ossimTerraSarModel.cpp.
References ossimKeywordlist::find(), and ossimplugins::ossim::iso8601TimeStringToCivilDate().
◆ initPlatformPosition()
|
private |
Definition at line 1483 of file ossimTerraSarModel.cpp.
References ossimplugins::ossimTerraSarProductDoc::initPlatformPosition(), ossimNotify(), and ossimNotifyLevel_DEBUG.
◆ InitRefPoint()
|
privatevirtual |
Initializes the Reference Point from a projection keywordlist.
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 1162 of file ossimTerraSarModel.cpp.
References ossimKeywordlist::find(), ossimplugins::CivilDateTime::get_decimal(), ossimplugins::CivilDateTime::get_second(), and ossimplugins::ossim::iso8601TimeStringToCivilDate().
◆ initRefPoint()
|
private |
Method to initialize RefPoint object from TerraSAR product xml file.
- Parameters
-
xdoc Opened product xml file.
- Returns
- true on success, false on error.
Definition at line 1554 of file ossimTerraSarModel.cpp.
References ossimplugins::CivilDateTime::get_decimal(), ossimplugins::CivilDateTime::get_second(), ossimplugins::ossimTerraSarProductDoc::getAzimuthStartTime(), ossimplugins::ossimTerraSarProductDoc::getAzimuthStopTime(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterAzimuthTime(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterLat(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterLon(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterRangeTime(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterRefColumn(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterRefRow(), ossimplugins::ossimTerraSarProductDoc::initTiePoints(), ossimplugins::ossim::iso8601TimeStringToCivilDate(), ossimNotify(), ossimNotifyLevel_DEBUG, ossimString::toDouble(), and ossimString::toFloat64().
◆ initSceneCoord()
|
private |
Method to initialize InfoIncidenceAngle parameters from TerraSAR product xml file.
- Parameters
-
xdoc Opened product xml file.
- Returns
- true on success, false on error.
Definition at line 1860 of file ossimTerraSarModel.cpp.
References ossimplugins::ossimTerraSarProductDoc::initSceneCoord(), ossimNotify(), and ossimNotifyLevel_DEBUG.
◆ InitSensorParams()
|
privatevirtual |
Initializes the Sensor Params from a projection keywordlist.
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 986 of file ossimTerraSarModel.cpp.
References ossimKeywordlist::find(), ossimplugins::SensorParams::Left, and ossimplugins::SensorParams::Right.
◆ initSensorParams()
|
private |
Definition at line 1513 of file ossimTerraSarModel.cpp.
References ossimplugins::ossimTerraSarProductDoc::initSensorParams(), ossimNotify(), and ossimNotifyLevel_DEBUG.
◆ InitSRGR()
|
privatevirtual |
Initializes the Slant Range to Ground Range data sets : _SrToGr_R0,_SrToGr_coeffs_number,_SrToGr_exponent,_SrToGr_coeffs,_nbCol.
Implements ossimplugins::ossimGeometricSarSensorModel.
Definition at line 1274 of file ossimTerraSarModel.cpp.
References ossimKeywordlist::find().
◆ initSRGR()
|
private |
- Note
- This method must be called before initRefPoint.
Definition at line 1333 of file ossimTerraSarModel.cpp.
References ossimXmlDocument::findNodes(), ossimplugins::ossimTerraSarProductDoc::getOrbitDirection(), ossimplugins::ossimTerraSarProductDoc::getRangeGateFirstPixel(), ossimplugins::ossimTerraSarProductDoc::getRangeGateLastPixel(), ossimplugins::ossimTerraSarProductDoc::getReferencePoint(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterRangeTime(), ossimplugins::ossimTerraSarProductDoc::getSceneCenterRefColumn(), ossimplugins::ossimTerraSarProductDoc::isProductGeoreferenced(), ossimNotify(), ossimNotifyLevel_DEBUG, ossimString::toDouble(), and ossimString::toInt32().
◆ loadState()
|
virtual |
Method to the load (recreate) the state of the object from a keyword list.
Return true if ok or false on error.
- Returns
- true if load OK, false on error
Reimplemented from ossimplugins::ossimGeometricSarSensorModel.
Definition at line 401 of file ossimTerraSarModel.cpp.
References ossimKeywordlist::find(), getClassName(), ossimplugins::ossimGeometricSarSensorModel::loadState(), ossimNotify(), ossimNotifyLevel_DEBUG, ossimString::toBool(), and ossimKeywordNames::TYPE_KW.
◆ open()
| bool ossimplugins::ossimTerraSarModel::open | ( | const ossimFilename & | file | ) |
Method to intantial model from a file.
Attempts to find the required xml file.
- Parameters
-
file
- Returns
- true on success, false on error.
Definition at line 176 of file ossimTerraSarModel.cpp.
References ossimSupportFilesList::add(), ossimFilename::expand(), ossimRefPtr< T >::get(), ossimplugins::ossimTerraSarProductDoc::getAzimuthStartTime(), ossimplugins::ossimTerraSarProductDoc::getAzimuthStopTime(), ossimplugins::ossimTerraSarProductDoc::getGenerationTime(), ossimplugins::ossimTerraSarProductDoc::getMission(), ossimplugins::ossimTerraSarProductDoc::getProductType(), ossimplugins::ossimTerraSarProductDoc::getProjection(), ossimplugins::ossimTerraSarProductDoc::getRadarFrequency(), ossimplugins::ossimTerraSarProductDoc::getRadiometricCorrection(), ossimplugins::ossimTerraSarProductDoc::getRangeFirstPixelTime(), ossimplugins::ossimTerraSarProductDoc::getRangeLastPixelTime(), ossimplugins::ossimTerraSarProductDoc::getSceneId(), ossimplugins::ossimTerraSarProductDoc::initGsd(), ossimplugins::ossimTerraSarProductDoc::initImageSize(), ossimSupportFilesList::instance(), ossimplugins::ossimTerraSarProductDoc::isTerraSarX(), ossimFilename::NIL, ossimXmlDocument::openFile(), ossimNotify(), ossimNotifyLevel_DEBUG, ossimNotifyLevel_NOTICE, ossimString::toFloat64(), and ossimString::upcase().
Referenced by ossimplugins::ossimTerraSarTiffReader::getInternalImageGeometry().
◆ print()
|
virtual |
METHOD: print() Fulfills base-class pure virtual. Dumps contents of object to ostream.
Reimplemented from ossimplugins::ossimGeometricSarSensorModel.
Definition at line 839 of file ossimTerraSarModel.cpp.
◆ printInfo()
| void ossimplugins::ossimTerraSarModel::printInfo | ( | ostream & | os | ) | const |
Definition at line 2445 of file ossimTerraSarModel.cpp.
◆ saveState()
|
virtual |
Method to save object state to a keyword list.
- Parameters
-
kwl Keyword list to save to. prefix added to keys when saved.
- Returns
- true on success, false on error.
Reimplemented from ossimplugins::ossimGeometricSarSensorModel.
Definition at line 282 of file ossimTerraSarModel.cpp.
References ossimKeywordlist::add(), ossimNotify(), and ossimNotifyLevel_DEBUG.
Member Data Documentation
◆ _acquisitionSensor
|
private |
Sensor (AcquisitionInfo node).
Definition at line 252 of file ossimTerraSarModel.h.
◆ _alt_srgr_coefset
|
private |
alternative SRGR computation coefficients.
Three doubles.
Definition at line 232 of file ossimTerraSarModel.h.
◆ _azStartTime
|
private |
Azimuthal Start Time (Start acquisition time).
Definition at line 298 of file ossimTerraSarModel.h.
◆ _azStopTime
|
private |
Azimuthal Stop Time (Start acquisition time).
Definition at line 303 of file ossimTerraSarModel.h.
◆ _calFactor
|
private |
CalFactor (Calibration node).
Definition at line 283 of file ossimTerraSarModel.h.
◆ _generationTime
|
private |
Generation time.
Definition at line 319 of file ossimTerraSarModel.h.
◆ _imagingMode
|
private |
ImagingMode (AcquisitionInfo node).
Definition at line 247 of file ossimTerraSarModel.h.
◆ _lookDirection
|
private |
LookDirection (AcquisitionInfo node).
Definition at line 257 of file ossimTerraSarModel.h.
◆ _noise
|
private |
Definition at line 273 of file ossimTerraSarModel.h.
◆ _numberOfLayers
|
private |
number of layer (ImageDataInfo node).
Definition at line 293 of file ossimTerraSarModel.h.
◆ _polarisationMode
|
private |
PolarisationMode (AcquisitionInfo node).
Definition at line 262 of file ossimTerraSarModel.h.
◆ _polLayer
|
private |
PolLayer (AcquisitionInfo node).
Definition at line 267 of file ossimTerraSarModel.h.
◆ _polLayerList
|
private |
Definition at line 268 of file ossimTerraSarModel.h.
◆ _productType
|
private |
ProductType.
Definition at line 237 of file ossimTerraSarModel.h.
◆ _radarFrequency
|
private |
centerFrequency (instrument node).
Definition at line 288 of file ossimTerraSarModel.h.
◆ _radiometricCorrection
|
private |
RadiometricCorrection.
Definition at line 242 of file ossimTerraSarModel.h.
◆ _rgFirstPixelTime
|
private |
First pixel Range Time (Start acquisition time in range direction).
Definition at line 308 of file ossimTerraSarModel.h.
◆ _rgLastPixelTime
|
private |
Last pixel Range Time (Start acquisition time in range direction).
Definition at line 313 of file ossimTerraSarModel.h.
◆ _sceneCenterRangeTime
|
private |
Scene Center range time.
Definition at line 222 of file ossimTerraSarModel.h.
◆ _sceneCoord
|
private |
SceneCoord (SceneInfo node)
Definition at line 278 of file ossimTerraSarModel.h.
Referenced by ossimTerraSarModel().
◆ _SrToGr_coeffs
|
private |
Slant Range TO Ground Range Projection coefficients.
Definition at line 218 of file ossimTerraSarModel.h.
◆ _SrToGr_exponent
|
private |
Slant Range TO Ground Range Projection exponents.
Definition at line 213 of file ossimTerraSarModel.h.
◆ _SrToGr_R0
|
private |
Slant Range TO Ground Range Projection reference point.
Definition at line 208 of file ossimTerraSarModel.h.
◆ _SrToGr_scaling_factor
|
private |
Slant Range TO Ground Range scaling factor at scene center.
Definition at line 227 of file ossimTerraSarModel.h.
◆ theProductXmlFile
|
private |
Definition at line 321 of file ossimTerraSarModel.h.
The documentation for this class was generated from the following files:
